거울손 프로젝트(Mirror Hand Project)
안녕하세요. 오늘은 Mirror Hand (거울손) 프로젝트에 대해 써 보겠습니다.
먼저 모습은
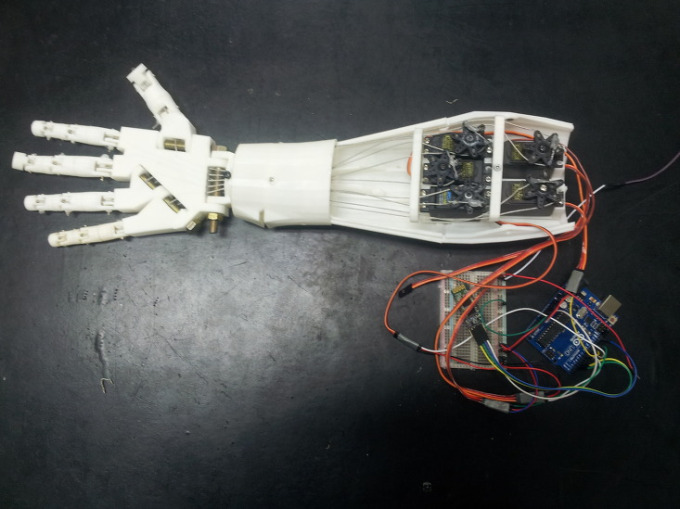
이렇게 생겼습니다.
아두이노 우노, 브레드보드(배선), HC-06 블루투스 모듈, 서보모터 5개, 스테인리스와이어와 볼트, 3D프린트된 손으로 이루어 져 있습니다.
손모양은 http://www.inmoov.fr 에 가시면 다운받으실 수 있습니다.
위의 손만 있으면 재미 없겠죠? 그래서 장갑을 만들었습니다.
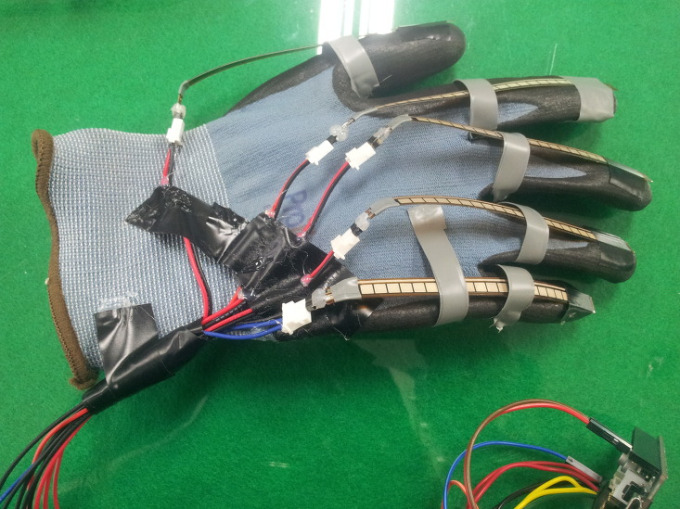
네 엄청 조잡합니다.
달리 구할 수 있는게 없어서 일단 저렇게 만들었습니다.
밑부분이 짤렸는데 저 부분은
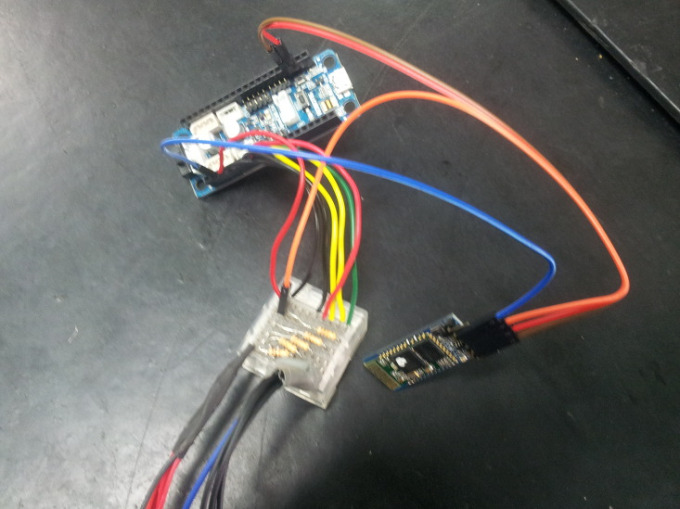
위와같은 회로입니다.
저항이 연결된 소형 브레드보드, HC-06 블루투스 보드와 로보티즈사의 OpenCM9.04보드입니다.
여기 첨부된 소스코드를 업로드합니다. (참고용으로만 사용해 주시기 바랍니다.)
프로토콜은 [?를 먼저 보내고, 문자열 길이인 len 2문자를 보냅니다.
a로 시작하여 b로 끝나는 사이에 엄지손가락 데이터, c로 시작하여 d로 끝나는 부분에 검지손가락 데이터 순으로 하여 j로 끝나는 새끼손가락까지 보냅니다.
그리고 마지막 문자인 ] 를 보냅니다.
그러면 아래와 같은 작동이 나옵니다.
다시보니 아쉬움이 많이 남는 프로젝트입니다.
꼭 업그레이드 버전을 만들 수 있도록 하겠습니다.